
A drone, in a technological context, is an unmanned aircraft. Drones are more formally known as unmanned aerial vehicles (UAVs) or unmanned aircraft systems (UASes). Essentially, a drone is a flying robot.

LED display of logo - Our IEEE ADGITM made a small electric display of the logo of IEEE ADGITM. This display currently decorates our IEEE ADGITM’s makers’ space.

Women Safety Device

Student members have developed smart gate lock accessed by RFID tags placed on the IEEE membership cards of student members. Every time a member enters and scans the lock, his information details along with time will be uploaded to the drive automatically as the lock is connected to the internet the whole time.
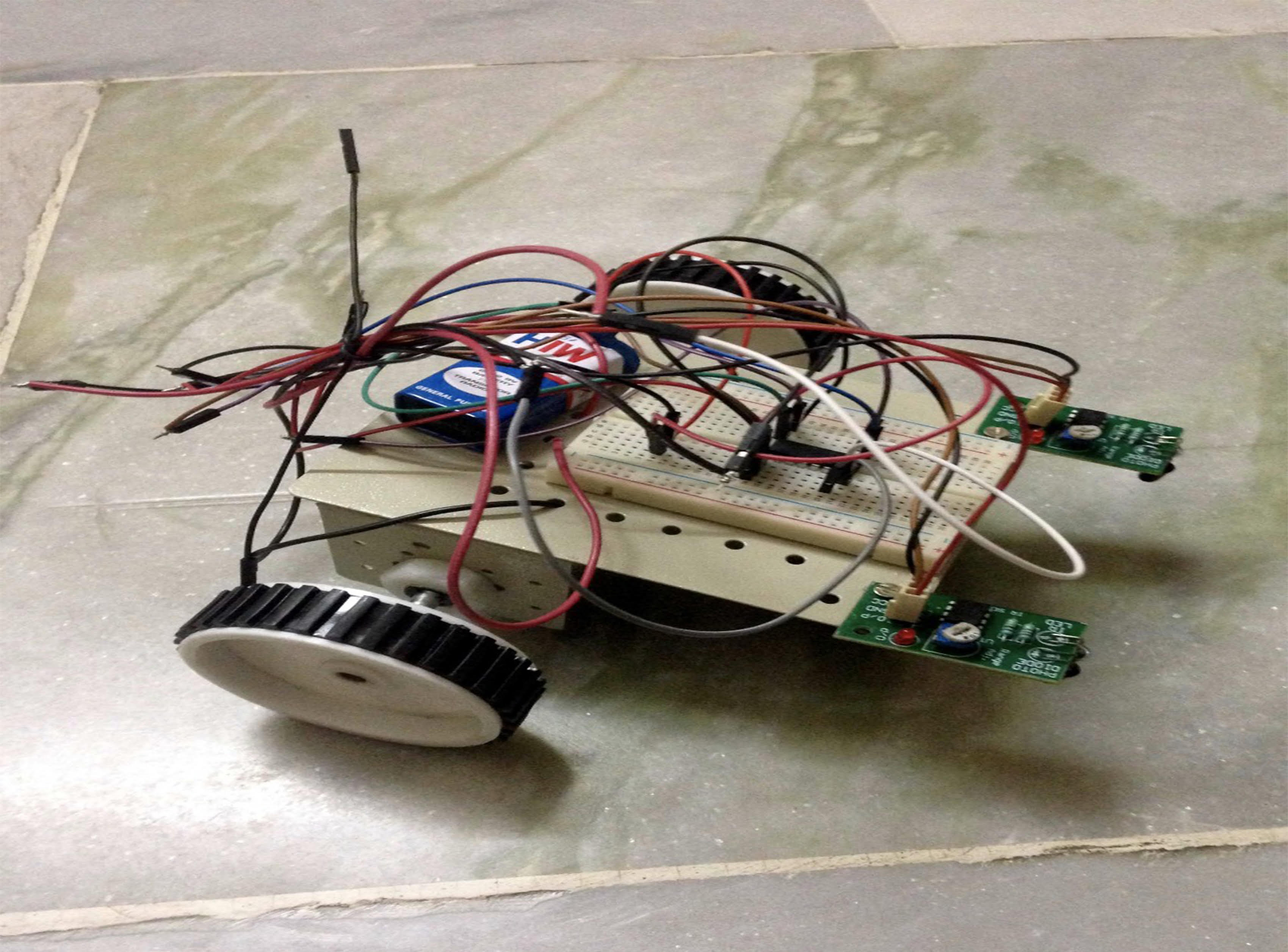
LFR - LFR stands for line following robot. Line follower is an autonomous robot which follows either black line in white are or white line in black area. Robot must be able to detect particular line and keep following it.
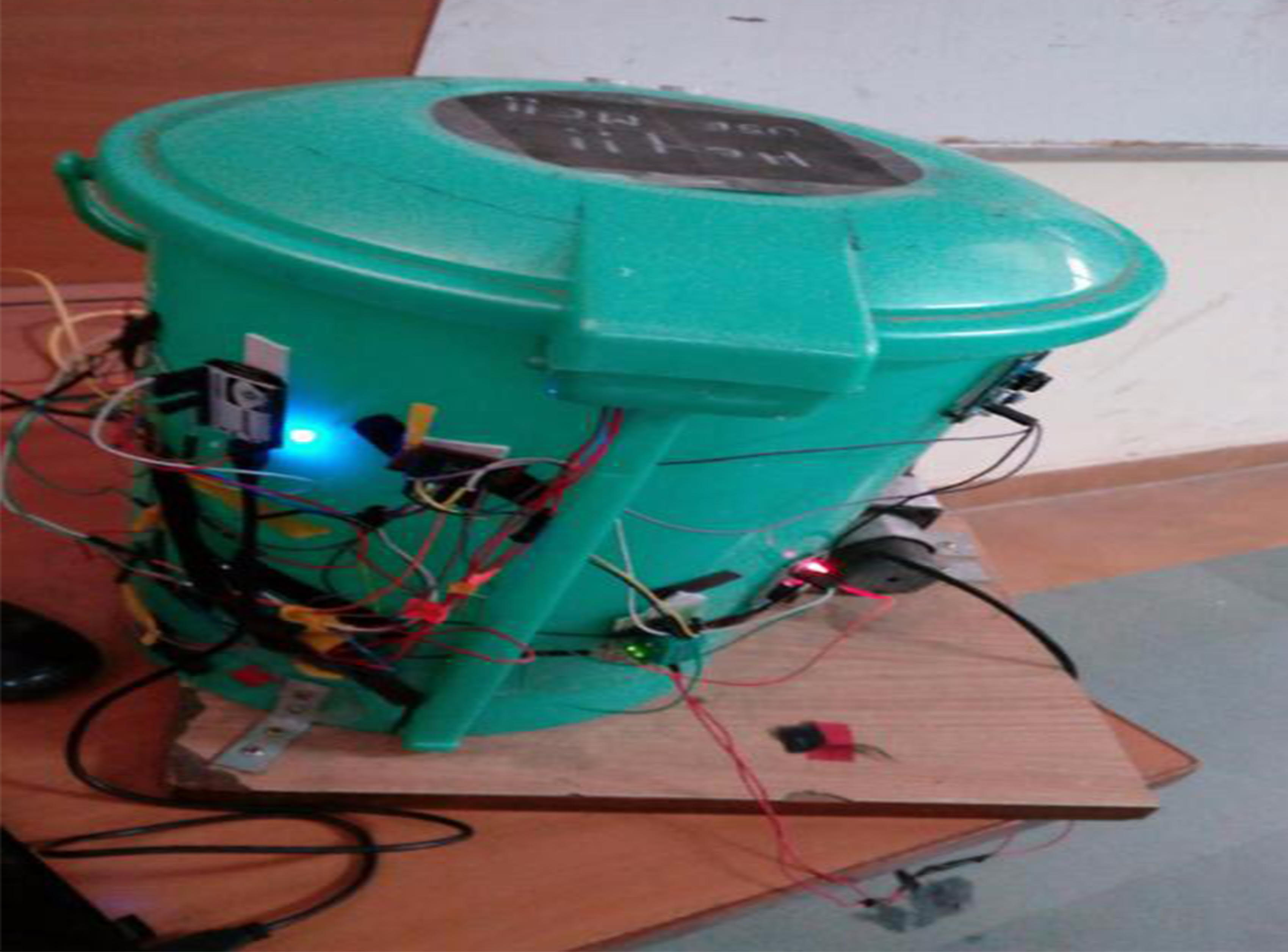
Smart Dustbin is the perfect example of smartness in non living things in our vicinity. As soon as it detects a hand or throwing garbage is approaching, the mechanical system let its flab open and rests down when idle. This is based on ultrasonic technology.

The robots operate semi or fully autonomously to perform services useful to the well-being of humans and equipment. With the aim of keeping our robot as simple as possible, while able to perform the initial goals, i.e. a vacuum cleaner robot that is capable to clean with the minimum human assistance. The specifications correspond to some of the expected behaviours that will be programmed into the robot. The main objective of this project is to design and implement a vacuum robot prototype by using AVR Microcontroller to achieve the goal of this project. This Vacuum Robot has several characterstics that are user-friendly, Enhanced Vaccum Suction, Longer battery life, Battery monitor alarm and most importantly its very less cost as compared to similar products in market. Another objective of this robot is to provide a substantial solution to the problem of manufacturing robotic cleaner utilizing local resources while keeping it's cost low as much as possible. This robotic vacuum cleaner, often called a robovac, is an autonomous robotic vacuum cleaner that is intelligently programmed and designed such that it uses spinning brushes to reach tight corners, Carpet boost mechanism, edge cleaning of room and Mopping system. Also it provides a number of cleaning options simultaneous to vacuuming, thus rendering the machine into more than just a robot "vacuum cleaner". This robot can be operated in both Fully Autonomous Mode and Manual mode. Each cleaning and operating mechanism has its own advantages and disadvantages.

The smart interactive mirror helps you stay organized right from the start of the day. The time when you stand in front of the mirror while brushing your teeth or arranging your hair, the mirror detects your presence and provides you with the latest news, the schedule of the day and the weather conditions of your area.

LED Cube - The 3D LED Cube is a really cool device that enables you to see in three dimensions, get some depth perception and has 512 LED's or 512 pixels. It is based on an arduino uno which is an Atmel AVR microcontroller on a development board with some standard interfacing pinouts that allow you to quickly assemble prototypes.
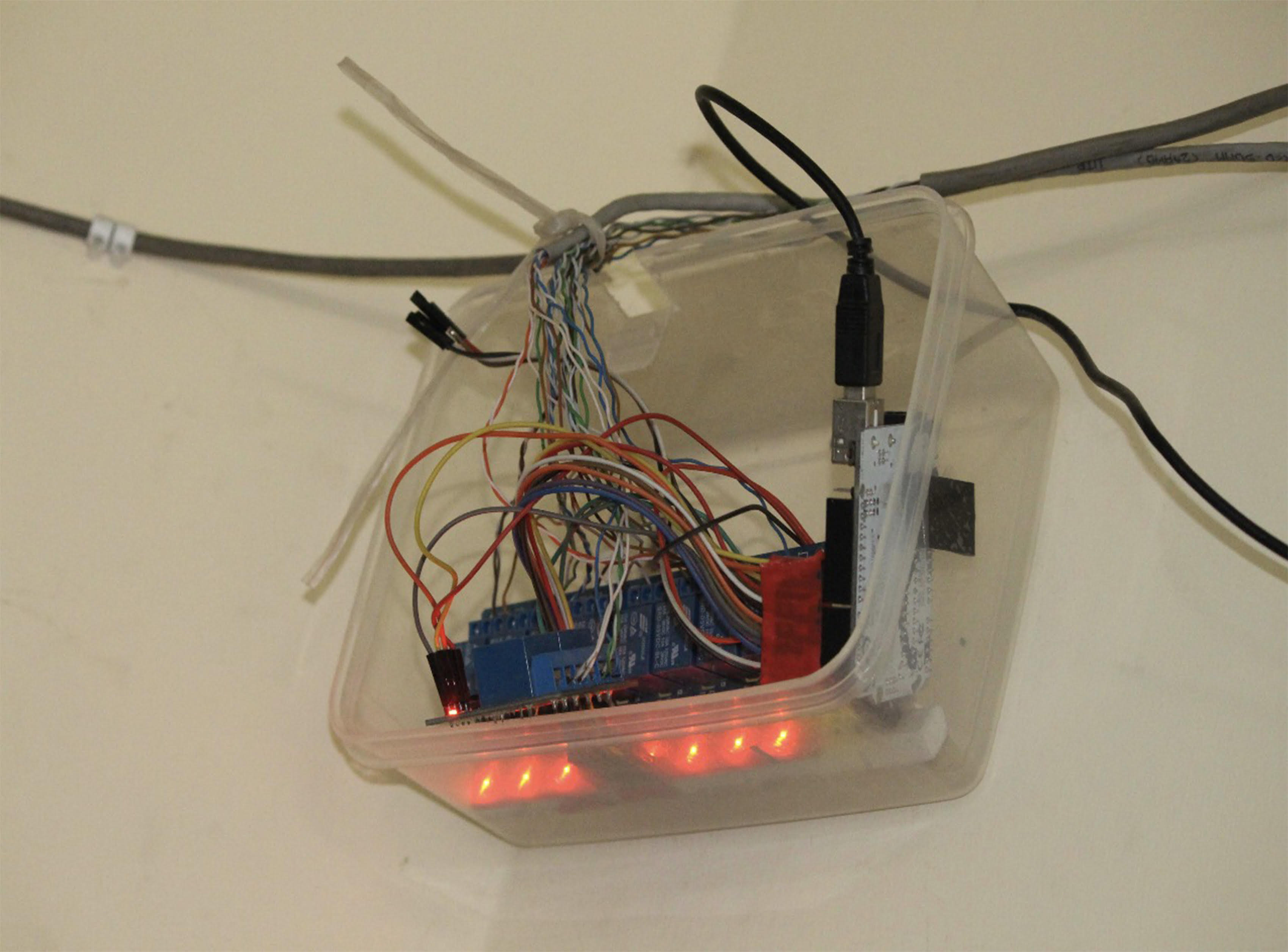
Home automation or smart home is building automation for the home. It involves the control and automation of lighting, heating (such as smart thermostats), ventilation, air conditioning (HVAC), and security, as well as home appliances such as washer/dryers, ovens or refrigerators/freezers. Wi-Fi is often used for remote monitoring and control. Home devices, when remotely monitored and controlled via the Internet, are an important constituent of the Internet of Things.